
AutoDrive
We make driving as safe as flying.
Project Description
AutoDrive is a European project focusing on the development of connected, electric and highly automated vehicles with special focus on safety. AutoDrive started in June 2017 and will last for 3 years. It has 60 partners, each of which is a company, a research institute or a university within Europe. Involved companies include Automotive OEMs, suppliers and also consultant companies.

With diverse background of all the partners, AutoDrive aims to find synergies among different aspects of autonomous driving. From the development perspective, it covers the whole development lifecycle from requirement analysis to validation and Test. From the product perspective, it includes most of the automotive functional components for automated driving such as perception, communication, decision, control and the electrical powertrain. From the technical perspective, it considers software, hardware, system architecture and safety.
This huge project is managed in a matrix way as shown in the figure below. The horizontal axis refers to the six technical work packages (WPs). The vertical axis refers to the 10 supply chains (SCs).
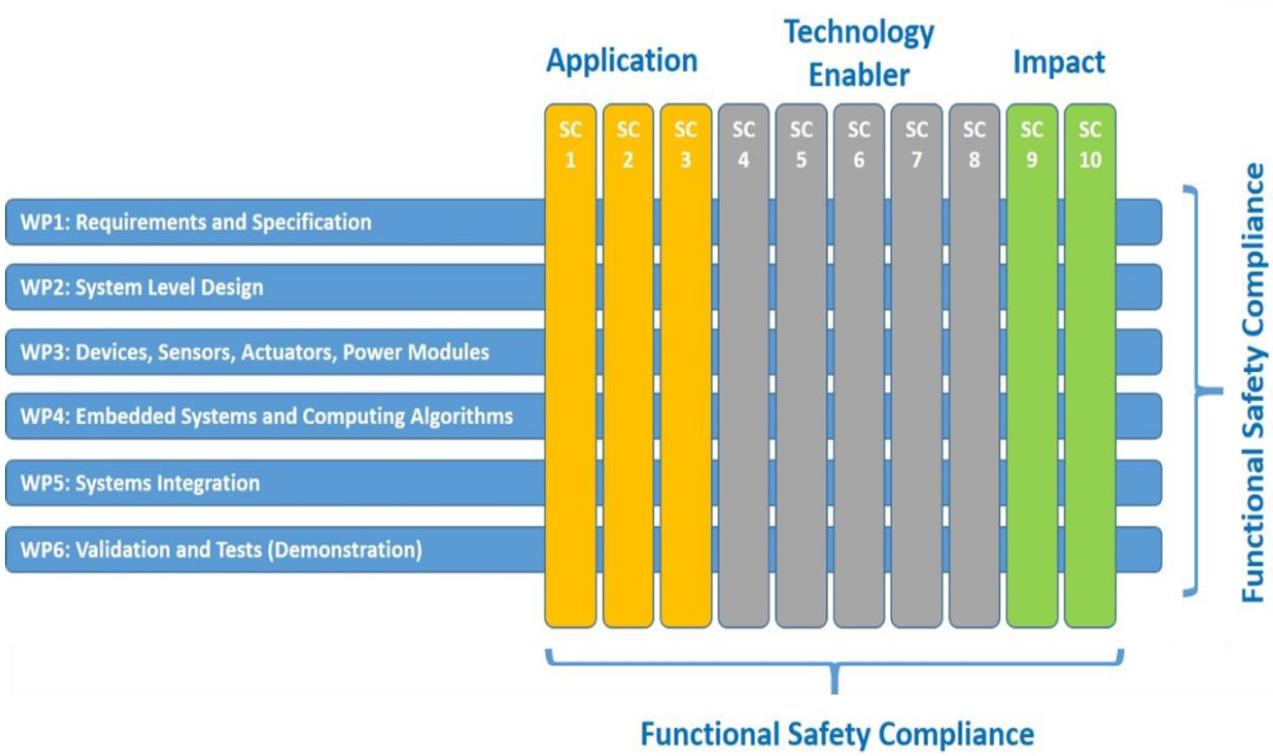
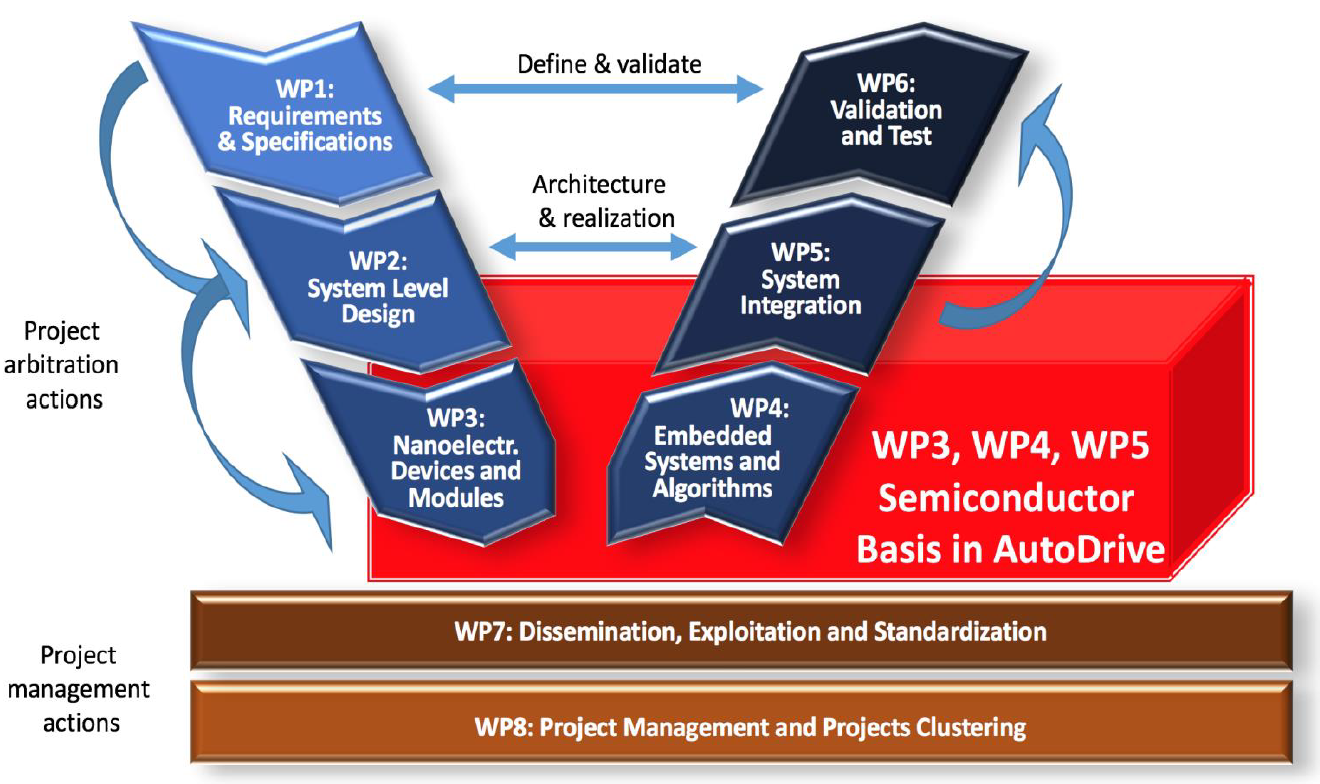
WPs are divided according to the development V cycle of the automotive domain as shown below. Each WP contains multiple tasks. The outcome of each task is a deliverable report.
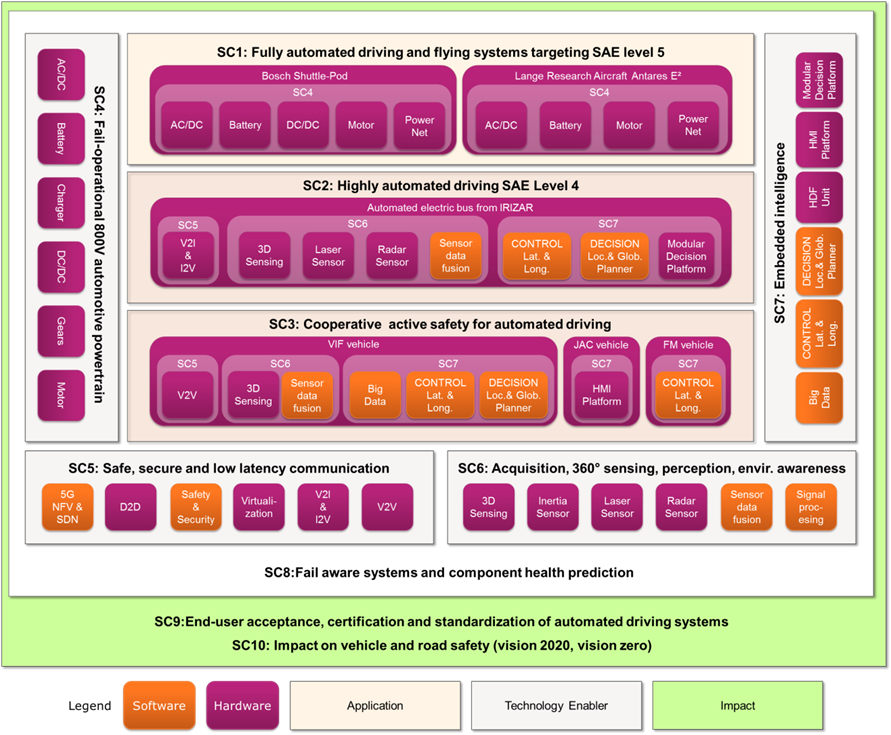
Each SC represents a technical enabler of highly automated vehicle. The relationship among the SCs is illustrated in the figure below. Each SC connects corresponding tasks in different WPs. The outcome of each SC is one or more demonstrators. Therefore, each partner needs to work for both deliverable reports and demonstrators.
KTH in AutoDrive
Within AutoDrive, KTH is mainly involved in WP1, 2, 5 and SC2, 3. The following table presents the tasks that KTH is involved in within the AutoDrive matrix structure. The date in parentheses denotes the end date of the task. Among these tasks, KTH is leading T2.10, which is marked in italics in the table below.
| SC2 HAD SAE Level 4 | SC3 Cooperative active safety | |
|---|---|---|
| WP1 (Req. & Spec.) |
T1.4 Requirements for future automated vehicle in urban scenarios (March 2018) | T1.6 Specification of critical scenarios for cooperative active safety (End 2017) T1.7 Specification of the active safety system (Feb. 2018) |
| WP2 (Sys. Lvl. Design) | T2.8 Design of architecture for automated vehicle in urban scenarios (Feb. 2019) | T2.10 Functional safety concept for active safety (Sep. 2018) |
| WP5 (Sys. Int.) | T5.8 Demonstrator integration and verification (End | T5.7 Integration of collaborative active safety system components (Feb. 2020) |
KTH also needs to contribute to two demonstrators
For SC2, KTH, with other partners, needs to work for an electric bus from IRIZAR to enable it with automated driving.

Contact
