

Självkörande fordon – för säkerhets skull
Kommer vi att tolerera privatbilism och lastbilsförare på framtidens vägar? Självkörande fordon som är uppkopplade i realtid mot trafik- och samhällsystem kan ju göra jobbet säkrare och effektivare, något som KTH:s forskning kring automatiska transportsystem inriktar sig på.
Föreställ dig att du rattar ett lastbilsekipage på 60 ton. Efter att ha lastat gods vid en terminal är du på väg att rulla ut från stadens industriområde med kurs mot en motorväg. Då plingar lastbilens ombordsystem till: ”Lastbilskonvoj två kilometer framför dig – vill du ansluta?”
Du klickar ja, kör ut på motorvägen och ser strax lastbilskonvojen där du lägger dig som tvåa i konvojen av fyra lastbilar. Där tar lastbilens autopilot över. Du släpper ratten, plockar fram surfplattan och lutar dig tillbaka för att titta på en film.
Det här scenariet, med en ”ledarlastbil” som kommunicerar med bakomliggande självkörande fordon i en konvoj har redan testats på allmän väg och är bara ett par år bort att nå en kommersiell fas. Ändå är bara det ett exempel på den rasande snabba utvecklingen kring smarta transportsystem där trafik- och samhällsinformation trådlöst kopplas ihop med alltmer intelligenta självkörande fordon.
– Både när det gäller fordon och intelligenta transportsystem görs det just nu väldigt mycket satsningar i hela Sverige, berättar Bo Wahlberg, professor i reglerteknik och den som leder KTH:s forskning kring autonomi som samlar runt 50 doktorander och industridoktorander.
– Vi ligger definitivt i framkant men samtidigt flyttas framkanten hela tiden med gigantisk hastighet. Det gäller att man har en stark samverkan mellan industri, samhälle och forskare, och där har vi kommit väldigt långt i Sverige, tillägger han.
KTH:s forskning på området ingår sedan ett drygt år i Sveriges enskilt största forskningsprogram WASP, Wallenberg Autonomous Systems Program.
Med 1,8 miljarder i forskningspengar i ryggen är tanken med programmet att svensk industri och forskning ska ta matchen med Tysklands ”industri 4.0” och USA:s ”industrial internet” när det gäller hela fältet av automation, där allt fler industri- och samhällssystem ska kopplas upp och bli självstyrande.
Bakom en oansenlig fasad ligger ITRL, Integrated Transport Research Lab, som är hjärtat i KTH:s forskning kring autonoma fordon. Här finns Smart Mobility Lab, som är en högteknologisk modellmiljö där forskarna kan projicera vägbanor på golvet och där självkörande en och en halv meter långa lastbilsmodeller åker tillsammans med animerade fordon i en virtuell miljö.
– Självkörande fordon handlar inte bara att utveckla autopilotfunktioner i privatbilar, som Google, Tesla och Volvo Cars gör med full kraft just nu. Som vi ser det är de intelligenta fordonen bara en av flera komponenter i en effektiv transportlösning. Här inriktar vi oss snarare på systemen och att få självkörande fordon att fungera i en alltmer uppkopplad miljö, säger Bo Wahlberg när han visar runt i lokalerna.
På ITRL står också en märklig konceptbil som med sin öppna ramkonstrukion påminner om en sandloppa. Fast den här elmotordrivna ”beach buggyn” är sprängfylld med sensorer. Här finns två laser-radar som scannar av hinder, flera kameror och en så kallad Real Time Kinematic-GPS med en noggrannhet ned på centimetern.
– Vi kallar den RCV, research concept vehicle, och just nu jobbar vi mycket med att få den att kunna köra av sig själv med hjälp av autonoma system. Fast den är inte riktigt gatumässig ännu, säger forskningsledaren Jonas Mårtensson och ler.
Om allt går enligt plan kommer konceptbilen att så småningom köra på allmänna gator i Kista inom ramen för Connected Mobility Arena som är ett initiativ att bygga upp en öppen testbädd för smarta transporter i stadsmiljö.
Tanken är att utforska möjligheterna med självkörande, uppkopplade och inte minst flexibla busslösningar.
Framtidens bussar ska kunna kalkylera sina rutter baserat på geodata, trafikdata och faktisk användning – och de ska finnas tillgängliga när behovet finns snarare än att köra på en bestämd tidtabell.
– I dagens städer har vi en statisk kollektivtrafik. Bussarna går tomma stora delar av dagen och är fulla i rusningstrafik. Men om vi i stället har ett flexibelt system där resenärer kan tala om att ’nu vill jag åka buss från där jag är nu’ och bussar som dockar med varandra eller kör i konvojer kan vi få ett smart resursutnyttjande och effektivare flöden i trafiken, säger Bo Wahlberg.
– Jag tror att också att utvecklingen med självstyrande bilar kommer att leda till att det blir färre fordon i städerna, fast bättre utnyttjade.
Fast stadsmiljöer är inte där vi först kommer att få se självkörande fordon. Det är enormt komplext att utveckla system som har att ta hänsyn till oberäkneligt beteende från fotgängare, cyklister och privatbilister. Och samtidigt samverka med system som trafiksignaler och köbildning.
Däremot är självkörande fordon i avgränsade miljöer som byggarbetsplatser, och framför allt gruvor, bara två till tre år bort, enligt Bo Wahlberg. Forskarna på KTH har varit med om att utveckla system för självkörande gruvlastbilar i samarbete med Scania.
– På fyra år har vi tagit oss från en någorlunda intelligent lastbil till en helt självkörande lastbil som i hög hastighet kan köra med en precision på tjugo centimeter på sidorna. En riktigt skicklig lastbilsförare uppnår en precision på en halvmeter som jämförelse, säger han.
Utvecklingen har kommit så långt att provbilen utan problem kan utföra en uppgift som att hämta och lossa ett gruslass. Den klarar också att på ett säkert sätt hantera hinder på vägen.
Och förarlösa lastbilar på motorvägar är bara ett par år bort, även om det blir en glidande övergång från allt smartare autopiloter till helt självkörande fordon, tror Bo Wahlberg.
– Jag får ofta den omöjliga frågan om när autonoma fordon slår igenom på allvar. Mitt svar är att det inte kommer att gå från ett tillstånd till ett helt annat över en natt. Snarare blir det en gradvis utveckling där man bygger ihop systemen och gör dem smartare och smartare. Frågan är om vi kommer att tillåta vanliga förare på motorvägar – det blir ju säkrare med självkörande bilar.
FAKTA
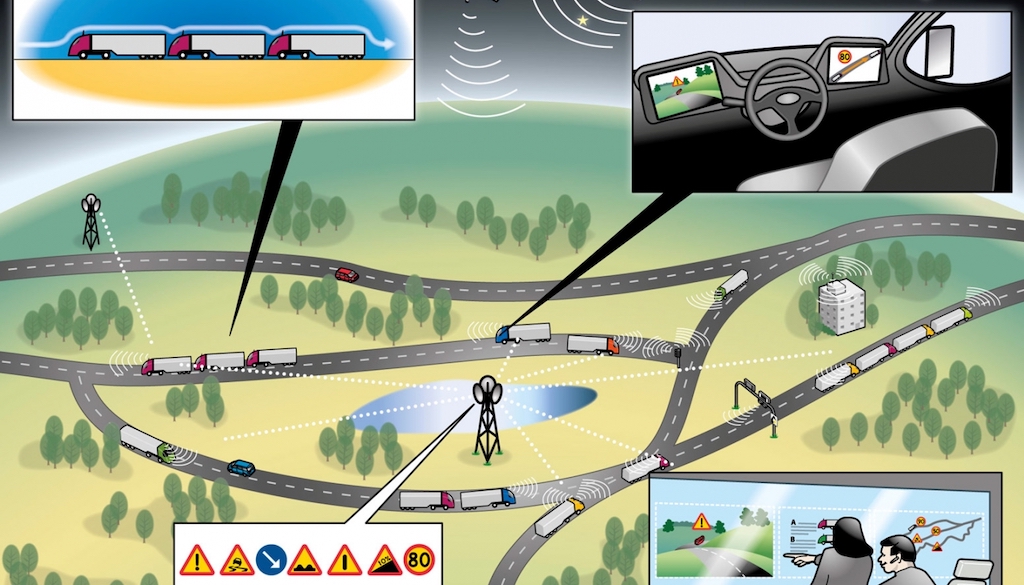
Så fungerar konvojkörning
-Lastbilarna kan ”docka in” i konvojer där ledarfordonet styrs av en förare och där förarna i de bakomliggande bilarna kan släppa ratten och låta autopiloten ta över.
-Lastbilarna i en konvoj kommunicerar inbördes med varandra och med det övergripande trafiksystemet.
-Systemet är laddat med trafikdata som geodata, vägmärken, trafikmönster och väderdata.
-Systemet styrs från en ledningscentral som följer lastbilarnas rörelser.
-Konvojkörningen med självkörande inslag leder till effektivare trafikflöden, höjd säkerhet, minskat luftmotstånd och lägre bränsleförbrukning.
Förarlösa lastbilar på motorvägar bara ett par år bort
– På fyra år har vi tagit oss från en någorlunda intelligent lastbil till en helt självkörande lastbil, som i hög hastighet kan köra med en precision på tjugo centimeter på sidorna.
– En riktigt skicklig lastbilsförare uppnår en precision på en halvmeter som jämförelse, säger professor Bo Wahlberg.
SVERIGES STÖRSTA FORSKNINGSPROGRAM
• WASP, Wallenberg Autonomous Systems Program, är Sveriges enskilt största forskningsprogram där Knut och Alice Wallenbergs Stiftelse stödjer en storsatsning på att svensk industri och forskning ska ta täten i utvecklingen mot det uppkopplade samhället.
• Forskningsprogrammet är ett samarbete mellan KTH, Chalmers samt Linköpings och Lunds universitet och svenska industriföretag som Scania, Ericsson, Saab, AB Volvo, Volvo Cars, ABB och Autoliv.
• Den totala satsningen uppgår till 1,8 miljarder kronor varav Knut och Alice Wallenbergs Stiftelse står för 1,3 miljarder. Resterande 500 miljoner kronor kommer från universitet och företag.
• Två av de sex forskningsprojekten i programmet koordineras av KTH: projektet Automatiska transportsystem som leds av Bo Wahlberg, professor i reglerteknik, och projektet Interaktion och kommunikation med autonoma agenter som leds av Danica Kragic, professor i datalogi.
Text Per-Ola Knutas
Illustration Smart Mobility Lab
KTH Magazine 16 DECEMBER, 2016