

RoBuoy
Dynamisk Positionering av en autonom boj med GNSS
Projektbeskrivning
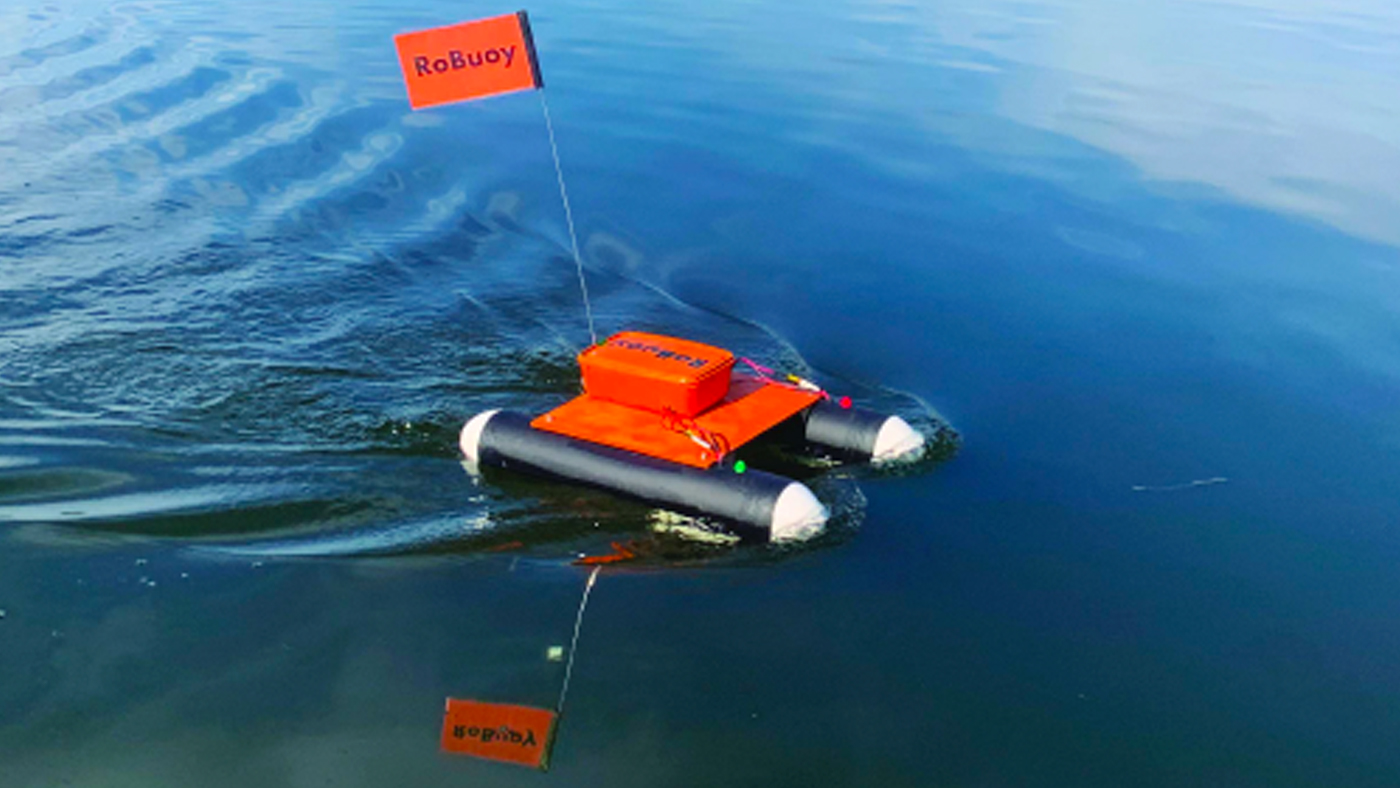
Bojar förankrade till havsbottnen används ofta för att märka ut banan i kappsegling eller andra vattensporter, men kan behöva flyttas flera gånger per dag. För att undvika det tids- och bränslekrävande arbetet av att lyfta och flytta ankarna byggdes och testades en prototyp av en autonom boj som håller sin position med hjälp av elmotorer.
Prototypbojen byggdes som en pontonbåt i katamaranutförande med en motor i varje skrov. För att navigera använde den en mottagare för Global Navigation Satellite Systems och en kompass som sensorer. Baserat på information från sensorerna styrde en mikrokontroller bojens kurs och hastighet med proportionella, integrerande och deriverande regulatorer.
Prototypen testades och utvärderades med avseende på konstruktionens lämplighet, reglersystemets prestanda och dynamisk positioneringsprecision. Förutom läckande propelleraxelstätningar ansågs den generella designen var lämplig, likaså PID-reglersystemet. Även om den stillastående GNSS-positionen var tillräckligt exakt, så registrerades inte rörelser mindre än 30 m. Följaktligen kunde bojen bara hålla sig inom 19.8 m från målpositionen i genomsnitt. Prestandan skulle kunna förbättras med en annan GNSS mottagare eller genom att uppgradera till Real Time Kinematics GNSS.
Poster
RoBuoy Dynamic Positioning of an Autonomous Buoy poster (Eng) (pdf 449 kB)
Rapport
Dynamic Positioning of an Autonomous Buoy using GNSS report (Eng) (pdf 1,1 MB)
MF 133X, Grupp 02
Erik Anderberg
Martin Olanders