

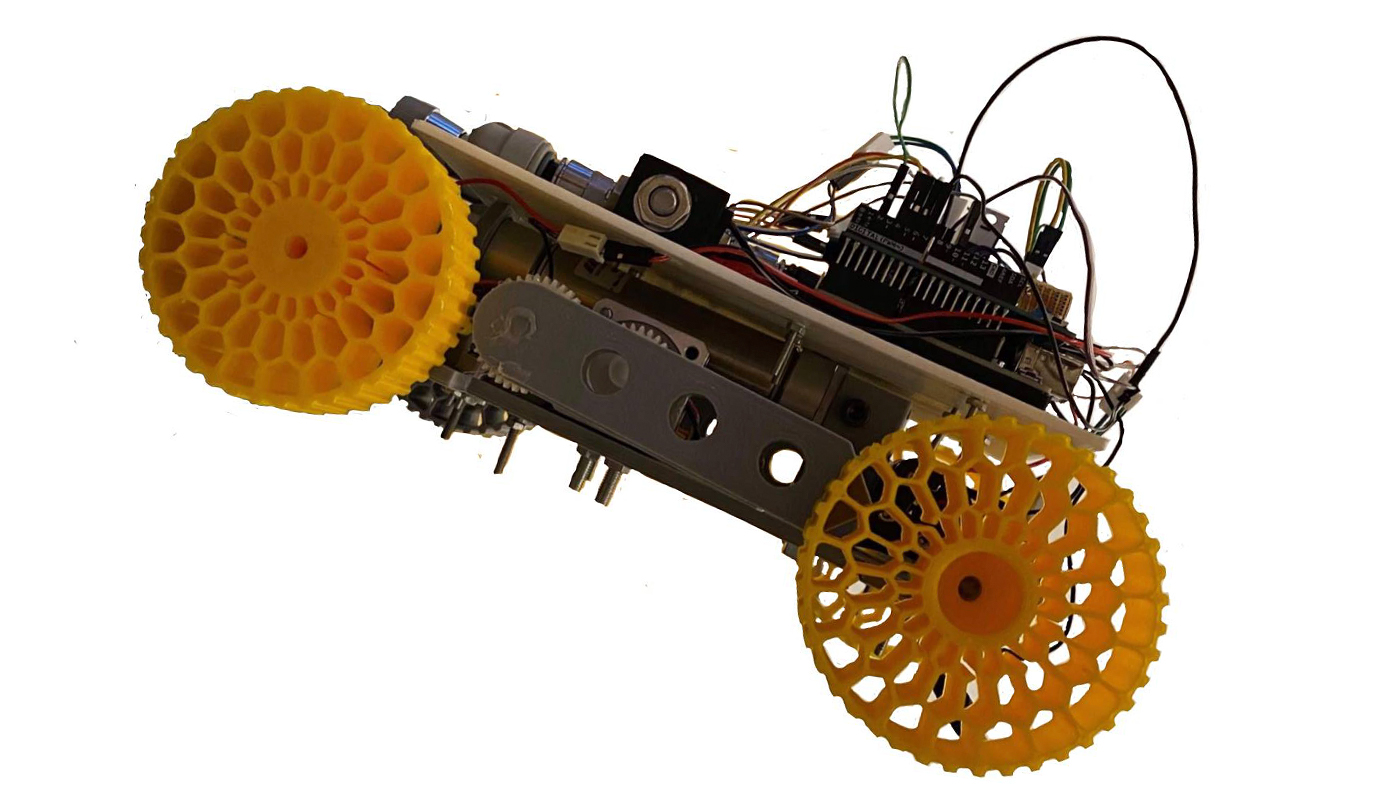
Pneumatisk hoppande bil
En robotbil som kan hoppa över hinder
Projektbeskrivning
I dagens samhälle presenteras nya utmaningar dagligen och behovet av autonoma lösningar i fordon ökar ständigt. I takt med det ökar behovet av kreativa lösningar. Detta examensarbete undersöker pneumatiska lösningen bakom att få en bil att hoppa. Analysen av teoritiska och experimentiella resultat visar en korrelation mellan bilens vikt och den möjliga hopphöjden. Med den valda konfigurationen är det inte möjligt att utföra hoppet och åtgärder tas upp i disskusionen.
Vidare forskning bör undersöka optimeringen av det pneumatiska systemet, specifikt på hur det maximala massflödet kan uppnås i systemet.
Poster
Pneumatic jumping car poster (Eng) (pdf 1,9 MB)
Rapport
Pneumatic jumping car report (Eng) (pdf 980 kB)
MF 133X, Grupp 25
Felix Ekman
Sofia Hansson