

Tennisborste
Projektbeskrivning
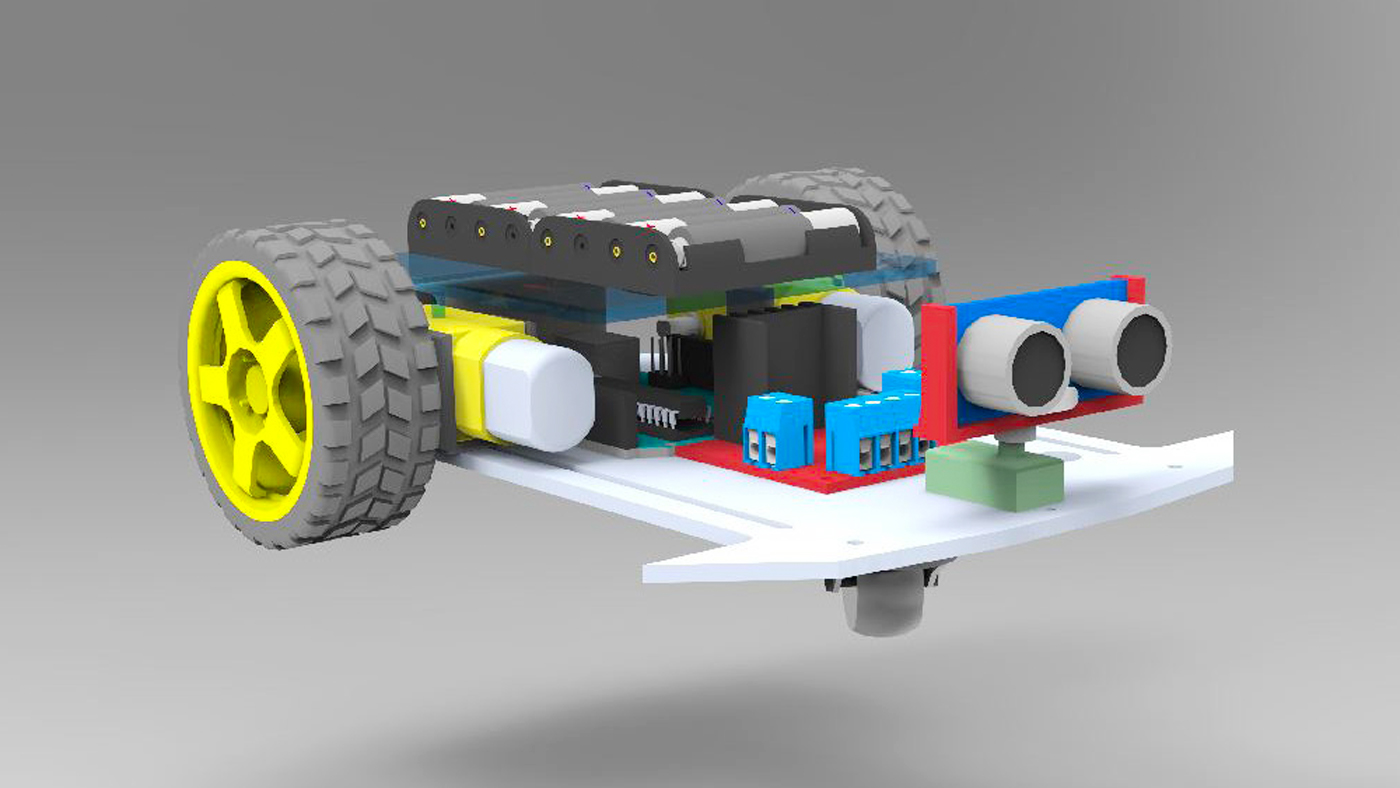
Tennis är en populär sport och på sommaren spelas den ofta utomhus. När en utomhustennisbana har använts måste den borstas. Först borstas hela banan med en stor borste och sedan de vita linjerna med en mindre borste. Syftet med denna uppsats var att designa och bygga en fungerande prototyp av en robot som kan göra allt detta av sig själv dvs. sopa tennisbanan och sedan de vita linjerna. Budgeten för komponenter till prototypen var begränsad till 1000 SEK. Verktyg och andra resurser så som 3D-skrivare, lödutrustning och laserskärare tillhandahölls av KTH gratis. Det första som gjordes var att samla information och inspiration om självkörande bilar och olika körmönster och några viktiga källor var gamla kandidatexamensuppsatser. Sedan kunde nödvändiga komponenter och dimensioner bestämmas. I detta projekt var huvudkomponenterna en Arduino Uno, två DC-motorer, en L298 H-brygga, en ultraljudssensor, en på/av-omkopplare, AAA-batterier och ett 9 V batteri.
Slutsatserna som kunde dras var att roboten kan fungera tillräckligt bra för att borsta en tennisbana med endast en förprogrammerad bana. För att sopa de vita linjerna skulle sensorer dock vara nödvändiga. En annan slutsats var att en robot kan sopa banan på samma tid som det krävs för två personer att sopa varsin halva.
Poster
Precision Court Sweeper poster (Eng) (pdf 387 kB)
Rapport
Precision Court Sweeper report (Eng) (pdf 1,9 MB)
MF 133X, Grupp 14
Jenny Alke
Maria Sandahl