

P.E.G.A.S
– Powered Exoskeleton Grip Amplifying System
Projektbeskrivning
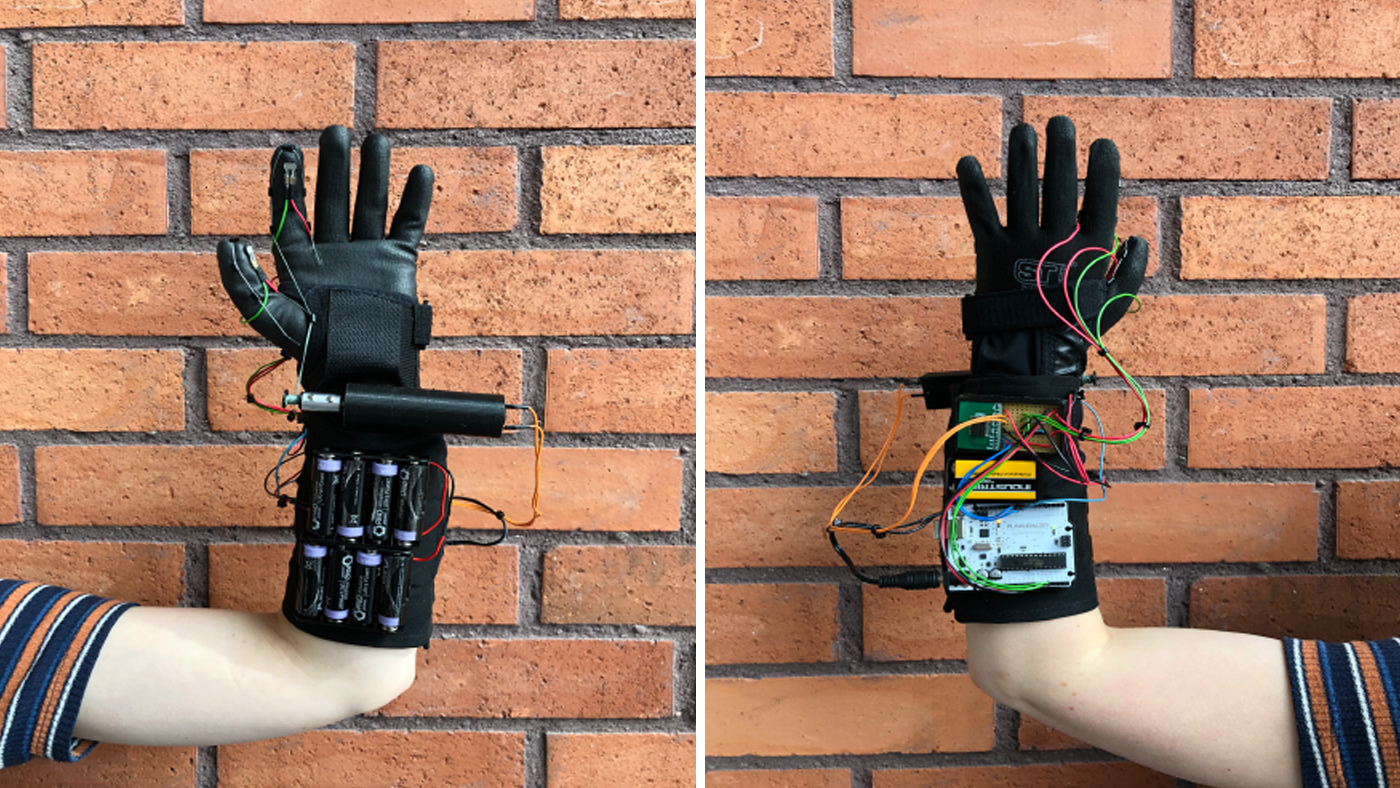
I detta kandidatexamensarbete behandlas utvecklingen och konstruktionen av ett mjukt exoskelett för den mänskliga handen. Syftet med projektet är att undersöka vilken typ av exoskelett som passar bäst för att hjälpa användaren med aktiviteter i det dagliga livet, samt hur detta exoskelett kan konstrueras för att förstärka greppet i handen. Prototypen ska även vara bärbar och inte skada användaren. Den nödvändiga teorin presenteras, följt av konstruktionen av den slutgiltiga prototypen. Syftet med projektet uppfylls och resulterar i ett flexibelt, portabelt och säkert exoskelett som kan hjälpa användaren med aktiviteter i det dagliga livet. Dock är denna prototyp begränsad till att endast inkludera styrning av tummen och pekfingret, och prototypen kan således i framtida arbeten utvecklas till att inkludera samtliga fem fingrar på den mänskliga handen.
Poster
P.E.G.A.S poster (Eng) (pdf 3,2 MB)
Rapport
P.E.G.A.S report (Eng) (pdf 1,7 MB)
MF 133X, Grupp 27
Malin Dyberg
Elvira Troillet