Eureka SMART COMACH Clean, Precise and Defect-Free Composite Parts Machining Robot
COMACH project answers the needs of composite part manufacturers to increase the competitiveness of the industry by proposing the development of a cost-effective and flexible robotic solution for the machining of composite parts, including an internal dust suction system for improved health and safety conditions, reduced energy consumption, increased precision and continuous process monitoring for right the first-time machining.
Objectives and results- Swedish consortium
The main objective of the project is to enable the machining of carbon fiber composite materials for industrial manipulatorsin the aerospace, automotive, and energy provision industries. The Swedish partners focus on two main goals:
- Improve positioning accuracy through quasistatic manipulator calibration
- Create design knowledge for industrial manipulators in contact applications
The goals have been fulfilled and demonstrated through the compliance calibration and online compliance error compensation of the TX200 at Ideko in Spain. The goals focusing on the performance evaluation of industrial manipulators in contact applications have been represented in three journal publications and five conference papers. The work developed in this project has ignited further collaboration in 2022/23:
- 2021, Joint publication with Hiroshima University on Kinematic and Compliance Calibration
- 2022, Tokyo University research visit on Compliance of industrial manipulators for telesurgical robot
- 2022, Technical University of Dresden, project application on Elasto-geometric calibration based on circular testing
General project results:
- The four Spanish partners (Aernnova, Aldakin, Zubiola, IK4-Ideko) developed the machining optimization and monitoring system for right the first time and defect-free machining
- The five Turkish partners (Turkish Aerospace Industries, Si-Mut Teknik, Kordsa, Maxima, Sabanci University) developed a spindle with internal fibre and dust suction system for reduced energy consumption and safe working environment
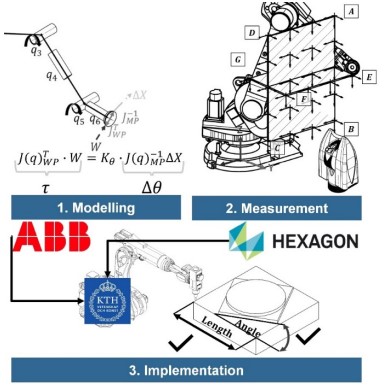
- The three Swedish partners (ABB, Hexagon, KTH) developed a robot accuracy increasing system to ensure the high geometric dimensions and tolerances under the external loads of the machining application
More information regarding the project:
Partners

Project contact persons
Coordinator

Responsible

Contributor

Contributor