
Onboard condition monitoring of vehicle-track dynamic interaction (RV29)
Project Coordinator - KTH
Project Leader at KTH - Mats Berg
Scientists at KTH - Rohan Kulkarni, Alireza Qazizadeh, Sebastian Stichel, Ulf Carlsson
Source of Funding - KTH Railway Group (Mainly)
Condition monitoring is introduced more and more in rail systems to support decisions on vehicle and infrastructure maintenance. Vehicle-track interaction is traditionally monitored from the track, but the present project aims at using sensors onboard in-service vehicles to detect malfunctions and suggest proper vehicle and/or track actions. Key malfunctions are ride discomfort and running instability with focus on resolving such issues by relevant maintenance. The work is a collaboration with the Railway Group members.
Literature studies in the field have been carried out including different algorithms and signal processing methods. Running instability detection and proper mitigation is planned to be in focus. If possible, axle box accelerations measured on X2000 vehicles should be used for case study.
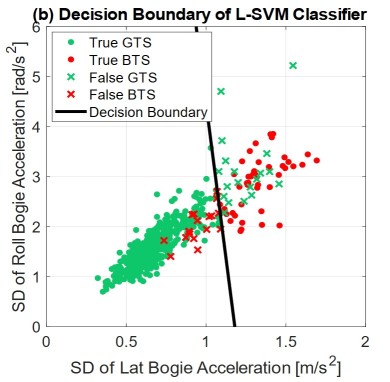
First a joint PhD work was carried out with Politecnico di Milano dealing with monitoring of track irregularities from accelerations of Italian in-service vehicles using machine learning classification. Both simulation and measurement results were used in this process and limit values for the irregularities were introduced. Promising results were achieved and an associated paper has been published.
As a first step in condition monitoring of running instability, simulations were performed for a vehicle similar to an X2000 coach including measured wheel profiles and degraded yaw dampers. Vehicle speed was varied slightly in the different simulations, but the rail profile and the track gauge were kept constant. Lateral accelerations of the bogie frames and axle boxes were recorded and subject to different machine learning classification algorithms. Also here promising results were obtained and the work was presented at an international conference in September 2019. The work on running instability has continued changing other parameters etc and is linked to the Shift2Rail projects IN2TRACK2 (WP3) and PIVOT-2 (WP5 & WP7).
A. De Rosa, R. Kulkarni, A. Qazizadeh, M. Berg, E. Di Gialleonardo, A Facchinetti and S. Bruni. Monitoring of lateral and cross level track geometry irregularities from onboard vehicle dynamics measurements using machine learning classification, Journal of Rail and Rapid Transit, online February 2020.
R. Kulkarni, A. Qazizadeh, M. Berg and S. Stichel. Fault detection and isolation method for vehicle running instability from vehicle dynamic response using machine learning, Proceedings of the 11th International Conference on Railway Bogies and Running Gears, Budapest, Hungary, September 2019.