
PRYSTINE
PRYSTINE - Programmable Systems for Intelligence in Automobiles
Aim and objectives
The goal of the PRYSTINE project is to strengthen and extend core competencies of the European industry, research and academia in the domain of smart mobility, with particular focus on electronic components and systems as well as cyber-physical systems (CPS).

As part of the PRYSTINE project, KTH will team up with a consortium of 60 partners from both industry and academia, ranging all the way from semi-conductor manufacturers to automotive OEMs as well as both universities and research institutes.

Together we will work on realizing Fail-operational Urban Surround perceptION (FUSION), which is based on robust Radar and LiDAR sensor fusion and control functions in order to enable safe automated driving in urban and rural environments.
The high-level goals of the PRYSTINE project are:
- Enhanced reliability and performance, as well as reduced cost and power consumption, of FUSION components
- Dependable embedded control by co-integration of signal processing and AI approaches for FUSION
- Optimized E/E architecture enabling FUSION-based automated vehicles
- Fail-operational systems for urban and rural environments based on FUSION
In order to achieve these goals PRYSTINE will deliver the following at the end of the project:
- A fail-operational sensor-fusion framework at component level
- Dependable embedded E/E architectures, and
- Safety-compliant integration of Artificial Intelligence (AI) approaches for object recognition, scene understanding and decision making within automotive applications
The resulting reference FUSION hardware- and software architectures will be validated through 22 industrial demonstrators, including:
- A fail-operational autonomous driving platform
- An electrical and highly automated commercial truck equipped with new FUSION components (such as LiDAR, Radar, camera systems and safety controllers) for advanced perception
- A highly connected passenger car capable of anticipating traffic situations
- Sensor fusion in human-machine interfaces for fail-operational control transition in highly automated vehicles
Overview of PRYSTINE Work-Packages and Supply-chains
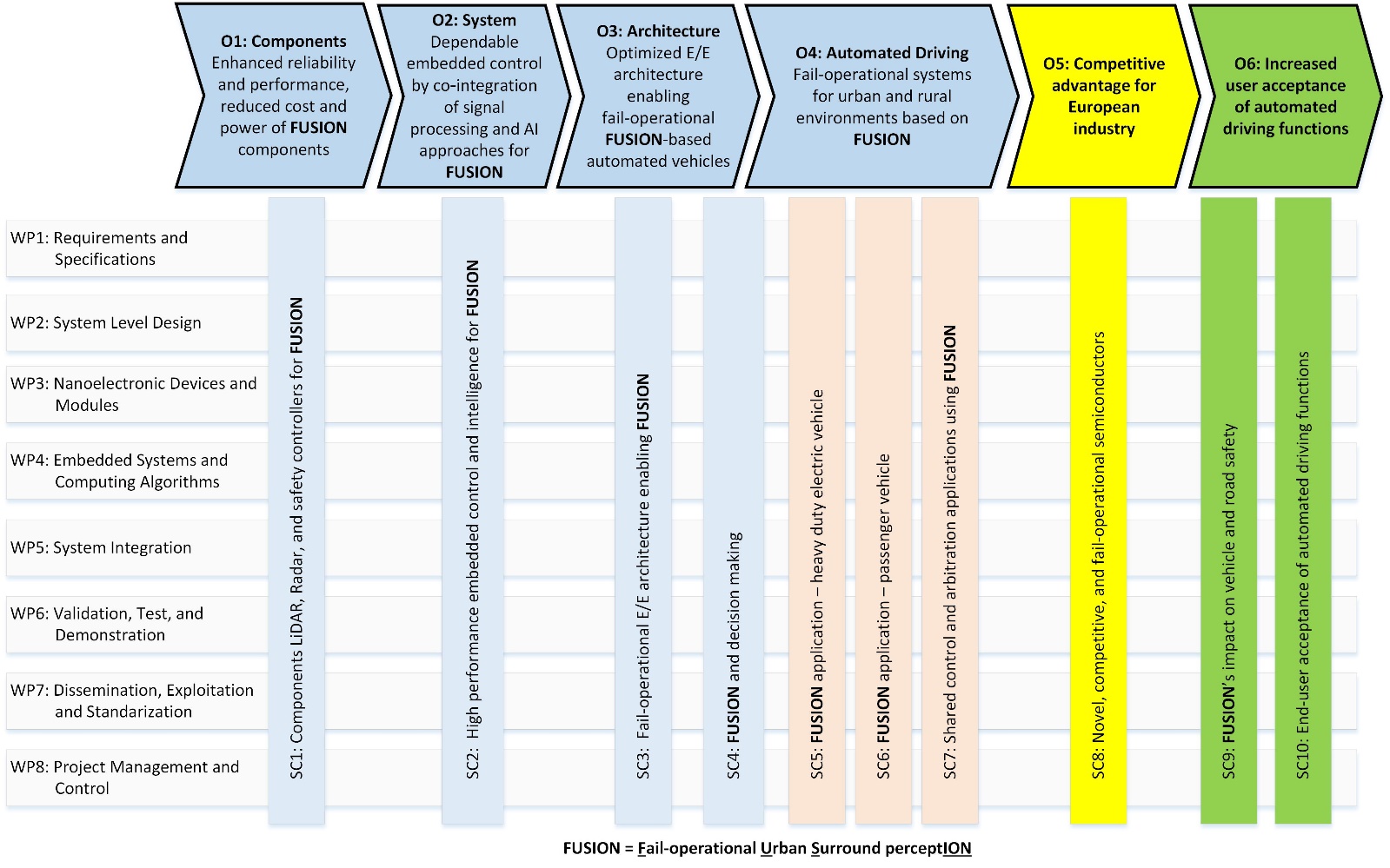
Supply-chains (SCs) in PRYSTINE denote a set of connected activities within the various work-packages (WPs) designed to ultimately produce some form of cohesive result, typically a demonstrator. In some other projects, such as ECSEL projects, the approach of using SCs is typically referred to as Use Cases. Each SC is responsible for posing requirements on the work taking place within various WPs, and are also used to coordinate and gather results from said WPs.
KTH will be involved in SC3 – Fail-operational E/E architecture enabling FUSION.
KTH's Involvement
Within the PRYSTINE project the researchers at KTH will be involved in the following WPs:
- WP1 – Task 1.4 Requirements and specifications for failoperational communication and E/E architecture
- KTH will provide requirements for architectures including safety patterns as well as for verification and validation methods for highly automated driving.
- WP2 – Task 2.4 System design and simulative analysis of the failoperational communication and E/E architecture
- KTH will, in close collaboration with Scania, develop novel supervisor architectures together with methods for run-time risk assessment and mitigation for highly automated driving together with accompanying design methods to ensure appropriate safety integrity. KTH will in addition develop a modeling and verification framework to ensure that variability in terms of vehicle configurations, scenarios and failure modes can be accounted for.
- WP5 – Task 5.4 Assembly and integration of failoperational communication and E/E architecture
- KTH will contribute to integration and realization of a generic fail-operational technical system architectures for highly automated driving (of all concepts developed in WP2), with a goal to setup a both a virtual as well as a physical test integration platform. The focus will be on safety and availability, and in supporting verification and validation activities for WP6, including those that take vehicle configurations into account.
- WP6 – Task 6.4 Test and demonstration of E/E architecture
- KTH will contribute to the evaluation as part of SC3 (E/E architecture), including testing and demonstration of architectures for highly automated driving. Specific emphasis will be placed on evaluation and demonstration of critical scenarios, including selected (difficult to handle) failure modes.
- SC3 - Within SC3, KTH will integrate the deliveries of all the workpackages, into our demonstrator AD-EYE ( www.adeye.se ) and showcase the work from the researchers involved.
In particular KTH will contribute with its expertise in architectures, safety and model-based engineering for autonomous systems, primarily with respect to WP2 - System level design (including Architecture, Modelling and Simulation) in relation to SC3: Fail-operational communication and E/E architecture, and in the corresponding integration, test and demonstration of E/E-architectures.
Additional information regarding the PRYSTINE project:
- The project page for PRYSTINE:
- The ARCHER project (predecessor to PRYSTINE):
- AutoDrive (sister project)
ContactProf. Martin Törngren ( )
- Adj. Prof. Mattias Nyberg ( mattias.nyberg@scania.com )
- Naveen Mohan ( naveenm@kth.se )
- Damir Nesic ( damirn@kth.se )
- Joakim Gustavsson ( joagusta@kth.se )
- Masoumeh Parseh ( mparseh@kth.se )
- Dr. Fredrik Asplund ( fasplund@kth.se )
- Dr. Sagar Behere