
Cooperative Autonomous Air and Surface System for Underwater Surveillance in Complex Ocean Environments Project
Project description
-
Funding agency: WASP Sweden
-
PI: Andreas Jakobsson (LU)
-
Co-PI: Isaac Skog
-
Project partners: Saab Dynamics
-
Duration: 2025 - 2029
OBS! We soon open a PhD student position at Lund University for this project. Please sen me a mail if you are interested.
Historically, Sweden holds a strong position within the area of underwater technology, with world-class submarines and autonomous underwater systems. In 2014, the Swedish government added the underwater
domain to a list of vital strategic interest areas where Sweden would seek to retain technological and operational advantage. An important component needed to ensure that Sweden retains technological and operational
advantage is the development of new scalable technologies for underwater awareness in complex environments.
Fixed sonar networks are typically deployed for long-term surveillance and protection of limited geographical areas of high strategic and societal value, such as harbors or wind parks. However, ships and helicopters equipped with sonar are typically used to monitor and protect movable assets or fixed infrastructure during increased security threats. Due to high operational and personnel costs, the latter is limited to
short-term surveillance of limited geographical areas. Further, surveillance is extremely challenging since — contradictory to the situation with fixed sensor networks — reliable, up-to-date acoustic propagation and noise models of the surveillance area are unavailable or can be learned from historical data. Thanks to the rapid development of fully digital sonar signal processing chains, energy-efficient data processing units, and autonomous unmanned air (UAVs) and surface (USVs) vehicles, it is now realistic to envision systems with collaborative autonomous platforms that can perform underwater surveillance operations.
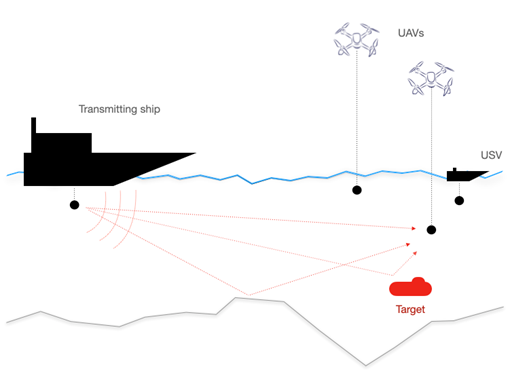
An example of an envisioned system setup conducting a surveillance task. Sound signals (pulses) are transmitted by manned ships, and multiple autonomous air and surface systems carrying hydrophones receive the signal. The transmitted signal waveform and the location of the autonomous systems are controlled to maximize the target detection probability and the tracking accuracy.
The figure above illustrates an envisioned system that can substitute or cooperate with manned ships and helicopters and make surveillance more scalable, cost-efficient, and safe. However, before such envisioned systems can become a reality, several scientific and technological challenges must be solved in areas such as energy supply, control, path planning, and sonar signal processing. Some of the most important signal processing and control challenges in this context are: How can acoustic underwater channel and noise models be learned quickly and robustly, given limited prior knowledge about the surveillance area? How can existing state-of-the-art target detection and tracking methods for radar applications be adapted to work with the learned underwater acoustics channel and noise models? How should the autonomous systems' locations and emitted sonar signals be controlled to maximize the gathered channel and target location information? To answer some of these questions and contribute to solving these challenges, the here proposed project aims to research techniques for:
• Fast and robust underwater acoustic channel learning using sparse structured Kronecker models.
• Integration of sparse structured Kronecker channel models into existing state-of-the-art track-before-detect target tracking frameworks.
• Sequential decision-making techniques for sensor management and path planning within track-before-detect target tracking frameworks.
The scientific challenges within the planned research range from the development of theories and methods for learning sparse acoustic channels — via the development of approximative inference methods that enable the sparse, but still high-dimensional, acoustic channel models to be used with current state-of-the-art target detection and tracking frameworks — to the development of real-time applicable sequential decision-making methods for sensor management. Furthermore, as the proposed research project will involve sea trials, the scientific challenges also include experiment designs to evaluate the developed techniques.
