
Tensor-Field Based Localization Project
Project description
-
Funding agency: Swedish Research Council (VR) & Security Link
-
Project leader: Isaac Skog
-
Project partners: FOI, Swedish Defense Research Agency
-
Duration: 2022 - 2027
Vector fields, such as the earth's magnetic and gravity fields, are highly informative sources for localization. These exemplified vector fields are omnipresent and stable over time, and variations in the fields, if measured accurately, provide a fingerprint highly correlated to the measurement location. Hence, they constitute a viable and robust source for localization in GPS-denied environments.
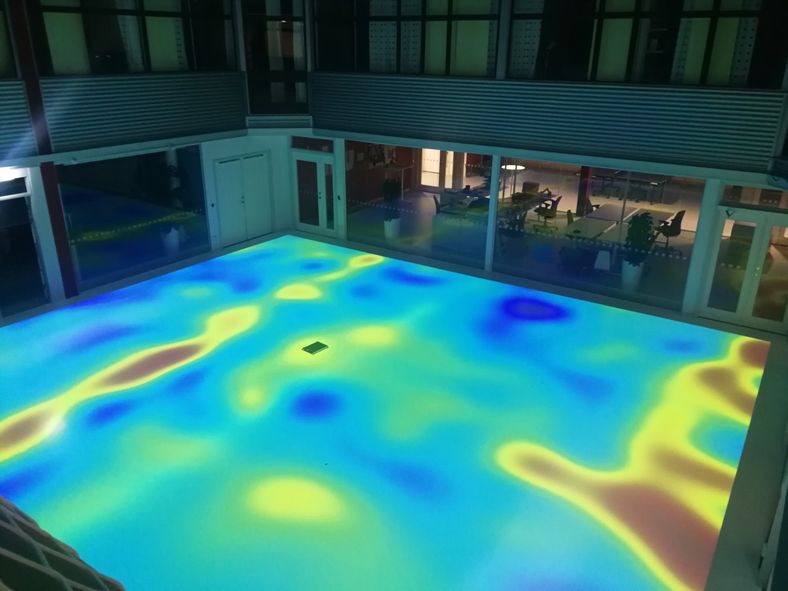
Illustration of the magnetic-field magnitude variations inside a room.
Thanks to the last decade's tremendous sensor technology development, high-performing and affordable accelerometer and magnetometer vector-sensor arrays can be constructed and integrated into portable devices and platforms. Similarly, as a camera can take an image of the surrounding environment, these sensor arrays can take an image-like measurement of a vector field - a type of measurement that, in the literature, is referred to as tensor-field observation as it constitutes an assembly of spatially separated vector-field observations. Just as in computer-vision-based localization systems, these tensor-field observations can be used for odometry via feature tracking, absolute localization via feature matching, and simultaneous localization and mapping (SLAM) via on-the-fly constructions of feature maps. However, unlike visual imaging, magnetic-field and gravity-field sensing are not impaired by smoke, dust, fog, etc. Further, in contrast to the hard-to-model structure of visual images, the imaged vector field must comply with, easy to model, physical laws. Based on these attractive properties, the purpose of the project is to explore how tensor-field observations, combined with inertial navigation1, can enable accurate, reliable, and cost-efficient "anywhere and anytime" self-localization. More precisely, the project aims to research and develop:
-
Sensor-fusion and model-learning methods for tensor-field-based odometry-aided inertial navigation will reduce the inertial navigation error growth rate from cubic to linear in time, enabling significantly longer stand-alone operation times before the location error gets too large.
-
Sensor-fusion and map-representation methods tailored for joint tensor-field-based odometry and SLAM. Compared to existing vector-field SLAM solutions, this will drastically extend the length of the allowable exploration phases where new areas are mapped and increase the accuracy and reliability through more informative field measurement.
Possible use cases of the developed self-localization solutions include pedestrian indoor navigation, underwater navigation, autonomous vehicle navigation in mines, aerospace navigation, etc.
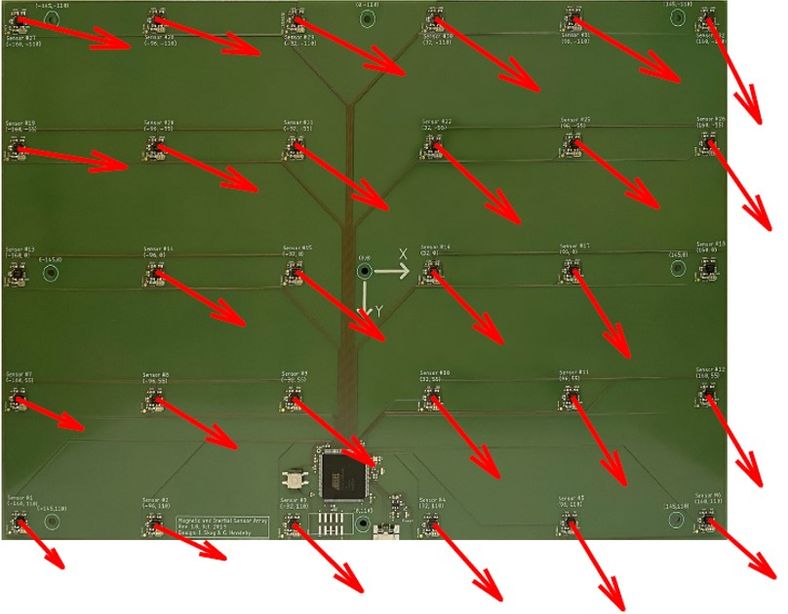 Picture of a magnetic sensor array with arrows indicating the direction of the measured local magnetic field.
Picture of a magnetic sensor array with arrows indicating the direction of the measured local magnetic field.
Results
The following publications have been produced within the project.
-
C. Huang, G. Hendeby, and I. Skog, An Observability-Constrained Magnetic-Field-Aided Inertial Navigation System, IPIN 2024. Chuan received the best presentation award for his presentation about the paper.

-
C. Huang, G. Hendeby, H. Fourati, C. Prieur, I. Skog MAINS: A Magnetic Field Aided Inertial Navigation System for Indoor Positioning, IEEE Sensor Journal, 2024.
-
C. Huang, G. Hendeby, and I. Skog A Tightly-Integrated Magnetic-Field aided Inertial Navigation System, IEEE Int. Conf. Information Fusion (FUSION), Jul. 2022.
-
I. Skog, G. Hendeby, and F. Trulsson, Magnetic-field Based Odometry – An Optical Flow Inspired Approach, IEEE Int. Conf. Indoor Positioning Indoor Navigation, Nov. 2021.
-
I. Skog, G. Hendeby, and F. Gustafsson, Magnetic odometry-a model-based approach using a sensor array, IEEE Int. Conf. n Information Fusion (FUSION), 2018.
A video of the MAINS system in action can be found here: Video of MAINS system
Tutorials
The tutorial "Indoor Localization using Magnetic Fields" was given at the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN) 2023 by Gustaf Hendeby, Manon Kok, and Isaac Skog. The slides from the tutorial can be downloaded here:
If you have any questions regarding the tutorial material, please email me.
