
Low friction fluidic surfaces
The vision of this project is to allow for spatial and temporal control of viscous drag and turbulence using MEMS techniques.
XXXX–XXXX
The vision of this project is to allow for spatial and temporal control of viscous drag and turbulence using MEMS techniques. Drag in fluid flows is the critical limiting factor in many applications: lubrication, energy conversion, propulsion, hydrodynamics, etc. Effective means to reduce/manipulate friction losses in fluid flows have an immense potential! For microscale applications we envision spatial and temporal control of viscous gradients in lab-on-chip systems for the control of fluid transport, valving, chemical separation and mixing. For macroscale applications we envision active, low friction, turbulence-controlling surfaces that are easy to produce, inherently self-cleaning and have no moving parts.
The main achivements are as follows. We have successfully demonstrated active control of the mass flow trough a microchannel by direct manipulation of the air lubrication layer present at a superhydrophobic channel wall. The method can retain the superhydrophobic functionality even for large air pockets and high liquid pressure.
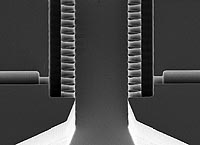
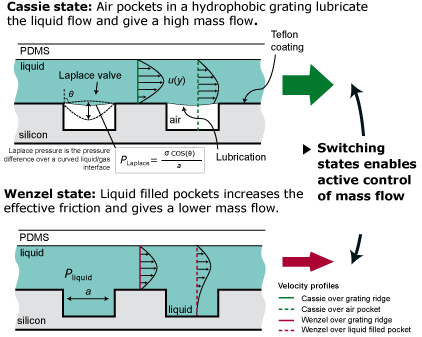
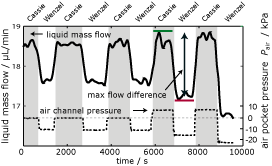
The air pockets trapped at a superhydrophobic micrograting during liquid priming are coupled to an actively controlled pressure source, allowing the pressure difference over the air/liquid interface to be dynamically adjusted. This allows for manipulating the friction reduction properties of the surface, enabling active control of liquid mass flow through the channel.
With the non-optimized grating used in the experiments so far, a difference in liquid mass flow of 4.8 % is obtained by alternatively collapsing and recreating the air pockets using the coupled pressure source, which is in line with a FE analysis of the same geometry. A FE analysis of a more optimized geometry predicts a mass flow change of over 30%, which would make possible new microfluidic devices based on local friction control.
A problem has been that the air pockets in a superhydrophobic surface need to be large in order to influence the bulk flow in the channel, this seriously limited the liquid pressure that the superhydrophobic surface could withstand without collapsing and loosing its lubricating properties. Quite the opposite, our design also permits for sustainable air lubrication at theoretically unlimited liquid pressures, without loss of superhydrophobic properties.We have experimentally shown that our method allows for sustainable liquid pressure 3 times higher than the collapse pressure (Laplace pressure of the pockets) of a passive device.
This work thus formed an important step towards the active temporal and spatial dynamic control of wall slip.
Project sponsor
- VR
Project members
- Gustav Amberg
- Minh Do Quang