

3D-printad robotarm
Design och kontroll av en 3D-printad 6DoF robotarm
Projektbeskrivning
Syftet med denna avhandling var att designa, konstruera och kontrollera en robotarm med sex frihetsgrader. Armen ska kunna utföra enkla uppgifter som pick-and-place med god noggrannhet och utan användning av externa sensorer. Denna avhandling undersöker precisionen och styrkan hos den konstruerade robotarmen.
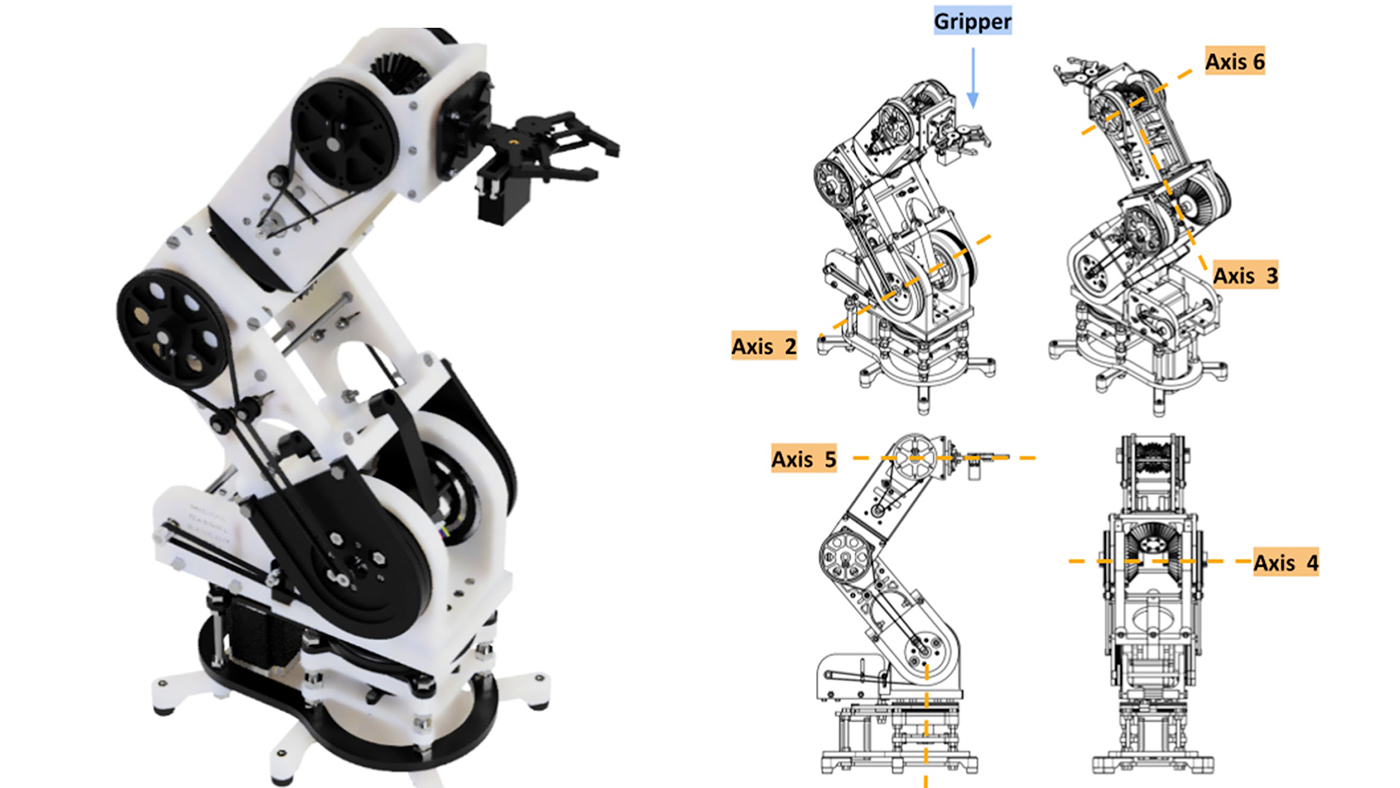
Armen konstruerades med 3D-printade delar och lättillgänglig hårdvara som gängstänger, lager, skruvar och muttrar. Varje axel använder en kombination av kuggremskivor och kuggremmar för att uppnå önskat moment. En differentialväxel användes i fyra av axlarna för att kombinera motorernas moment och minska vikten i armens övre delar.
Roboten drivs av sex stegmotorer som styrs av en kombination av RAMPS 1.4-shield och Arduino Mega 2560 mikrokontroller. Användaren kan styra varje axel genom att skicka kommandon till Arduinon via en USB-kabel. Kommandona genereras med hjälp av ett enkelt användargränssnitt skrivet i Python.
Experiment har visat att armen har en genomsnittlig felökning på 0,0289-0,1356 mm för varje rörelse, beroende på vald hastighet. Den högsta vikt som armen i värsta fall kan hålla är 0,84 kg.
Poster
Design and control of a 3D printed, 6DoF robot arm poster (pdf 2,6 MB)
Rapport
Design and control of a 3D printed, 6DoF robot arm report (Eng) (pdf 3,0 MB)
MF 133X, Grupp 34
Michal Gabriel Sawczuk