

Utvalt eftergivlig robotarm
Konstruktion av en utvalt eftergivlig robotarm och utvärdering av dess precision
Projektbeskrivning
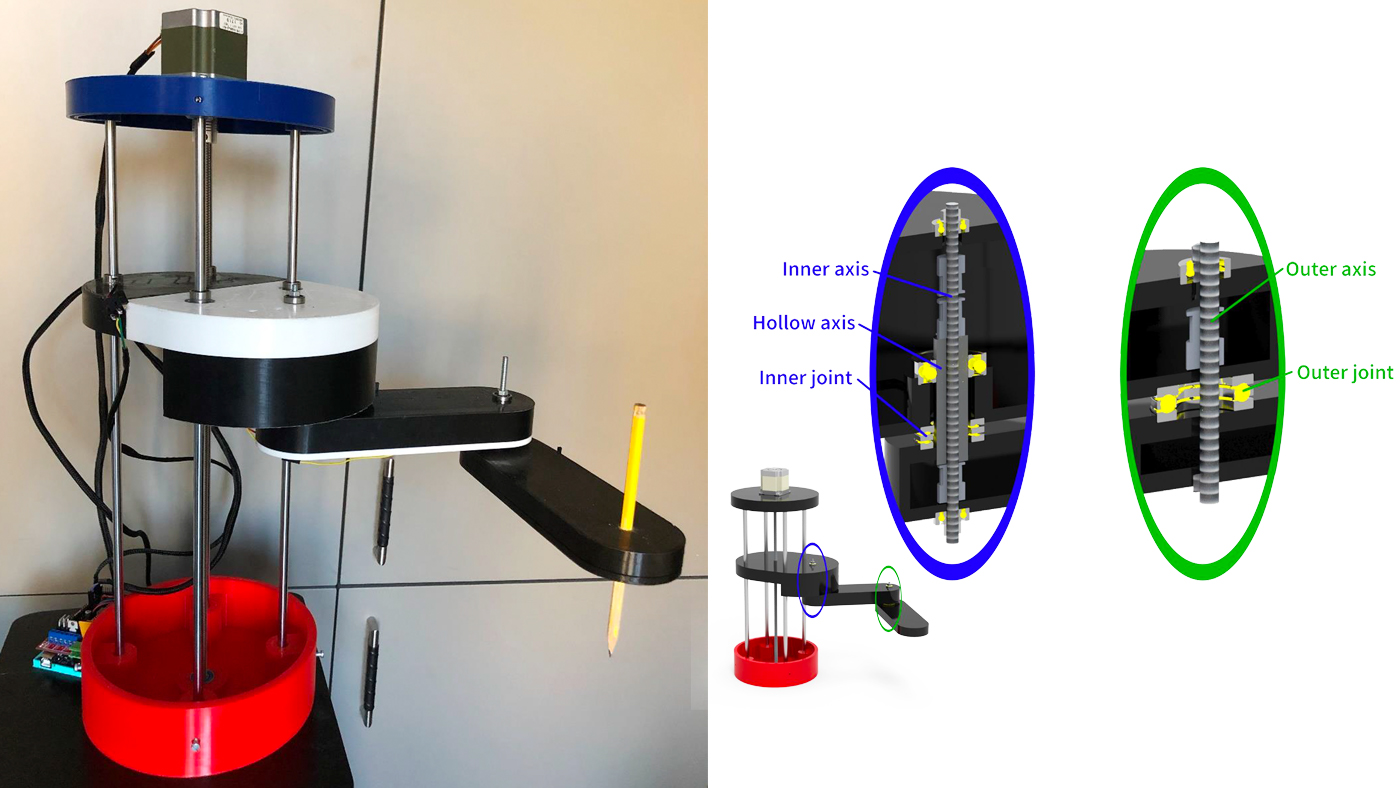
Konceptet av en robotarm används brett inom många industrier. Detta projekt syftar till att konstruera en robot av typen SCARA, selective compliance articulated robot arm. Målet var att undersöka hur en sådan robot kan 3D-printas och dess precision. Förutom 3D-printade delar användes även guidestänger, kullager, kamremmar och remskivor. Robotens rörelser styrs tillsammans med en mikrokontroller och tre stegmotorer. Med tillvägagångssätten i åtanke resulterade projektet in en SCARA med rimlig precision. Mer specifikt var medelfelet 3.6 cm i X-led och 2.3 cm i Y-led.
Den största nackdelen med den slutgiltiga konstruktionen var den negativa jämvikten mellan att spänna kamremmarna och friktionen i den inre armleden. Att spänna kamremmarna innebar en ökning i friktion och därmed oönskade rörelseegenskaper. Att göra tvärtom innebar att bältena löpte större risk att glida ur och möjliggjorde dödgång.
Poster
Construction of a Selective Compliance Articulated Robot Arm poster (Eng) (pdf 346 kB)
Rapport
Construction of a Selective Compliance Articulated Robot Arm report (Eng) (pdf 1,2 MB)
MF 133X, Grupp 23
Anton Labbé
Benjamin Ström